CAN(Controller Area Network)通信とは
CAN(Controller Area Network)はシリアル通信プロトコルで、基本的な用途は自動車の電子制御機器間の通信です。CANは、ドイツのBOSCH社が1989年に開発されて、現在では工場をはじめ医療現場などでも活用されています。
CANの主な用途は次のとおりです。故障診断、測定・キャリブレーション、 オートエアコンやメーターなどの制御で特長は次のとおりです。
- 最小限の信号線で各種デバイスを接続できる
- 外部からのノイズに強い
1. CANの基本構成
CAN通信は2本の信号線を使用します。業界やメーカーごとに慣習的な色使いが存在します。あくまで色は識別のための目安であり、重要なのはCAN_HとCAN_Lを正しく対応させることです。
- CAN_H(High):青
- CAN_L(Low):白
これらはツイストペアケーブル(ねじり対線)で構成されることが一般的で、ノイズの影響を最小限に抑えるために設計されています。
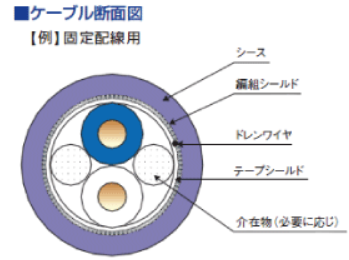
※JMACS株式会社様HPから抜粋。
2. 配線の基本ルール
- ツイストペアケーブルの使用: CAN_HとCAN_Lは必ずツイストペアケーブルで配線してください。ツイストすることで外部ノイズを打ち消し合い、通信の安定性が向上します。
- ケーブル長: 通信速度(ビットレート)に応じて最大ケーブル長が決まります。最大通信速度は1Mbps。
- 終端抵抗: CANバスには両端に終端抵抗(通常120Ω)を接続する必要があります。バスの最初と最後のノードに1つずつ、合計2つ設置します。
3. 配線の接続方法
- ノードの接続: CAN通信では複数のデバイス(ノード)が1つのバスに接続されます。数珠繋ぎ、デイジーチェーンとも言います。
- シールド: ノイズの多い環境では、シールド付きツイストペアケーブルを使用し、シールドを接地することを検討してください。ただし、接地は一箇所のみ(シングルポイント接地)で行い、グランドループを避けてください。
4. 電源とグランド
- CANトランシーバには電源供給が必要で、CAN_HとCAN_L自体は電源線ではありません。
5. 注意点
- 他の信号線との距離: 高電圧線やモーターなどのノイズ源から離して配線してください。
\ 最新情報をチェック /